


-
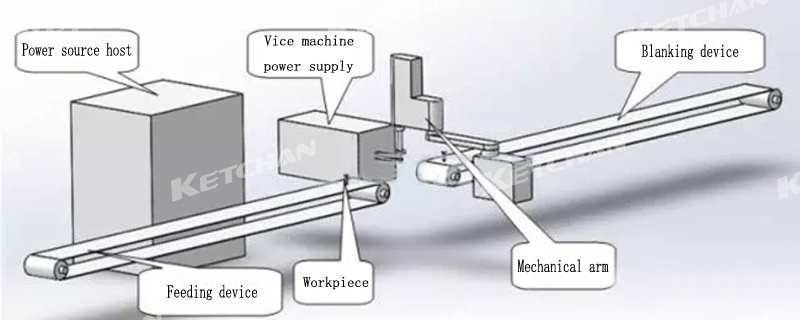
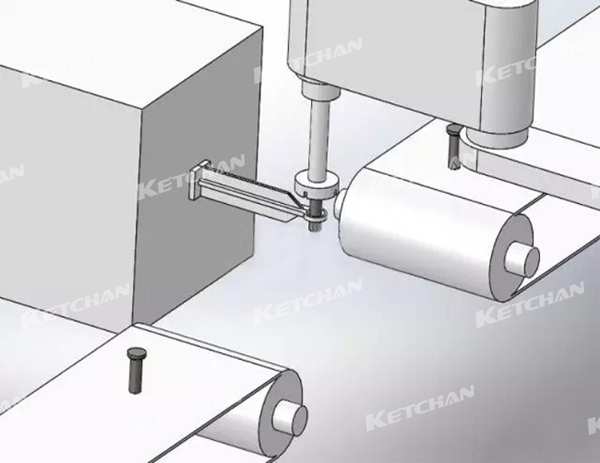
 Sistema de endurecimiento CNC
Sistema de endurecimiento CNCMáquina herramienta de endurecimiento CNC
-
Sistema de endurecimiento CNC
Máquina de endurecimiento por inducción CNC
-
Sistema de tratamiento térmico por inducción
Equipos de tratamiento térmico por inducción
-
Sistema de calentamiento por inducción de alta frecuencia
Máquina de endurecimiento por inducción de alta frecuencia
-
Sistema de tratamiento térmico por inducción
Máquina de endurecimiento por inducción de válvulas
-
 Sistema de tratamiento térmico por inducción
Sistema de tratamiento térmico por inducciónVálvula de motor de endurecimiento por inducción





